FrankX or Libfranka Configure A Motion Generator Node for Franka Robot
Get Robot State
I will start with walking through how to access robot status in real-time based on the interface provided by FrankX and libfranka.
FrankX
The original version of this package does not provide a implementation on acquiring the state data while robot moving. You have to manually add the changes from Pull requests to your lib, which has instantiated a franka::RobotState asynchronous_state. Get real-time robot state information by robot.get_state(read_once=False) while drive it by move_async. There’s a general limitation (far less than 1000Hz) of sampling rate of this method, it can’t reach the actual control looping frequency from robot, which is reasonable. So maybe it is only useful for just some entry application or without a strict demand on executing frequency.
⛔ By the way, wired thing would happen when you try to print out the state information on your terminal after
get_state(read_once=Flase), the obtained data would be totally random in this situation. You should change theread_oncetoTrueto get proper output, yet with a drastic decline on sampling rate.
Libfranka
The real-time commands on robot motion can only be generated and sent by Libfranka in its control loop. The motion generation module provided by FrankX is only a one-time thing, mostly used to drive the robot move along certain path points.
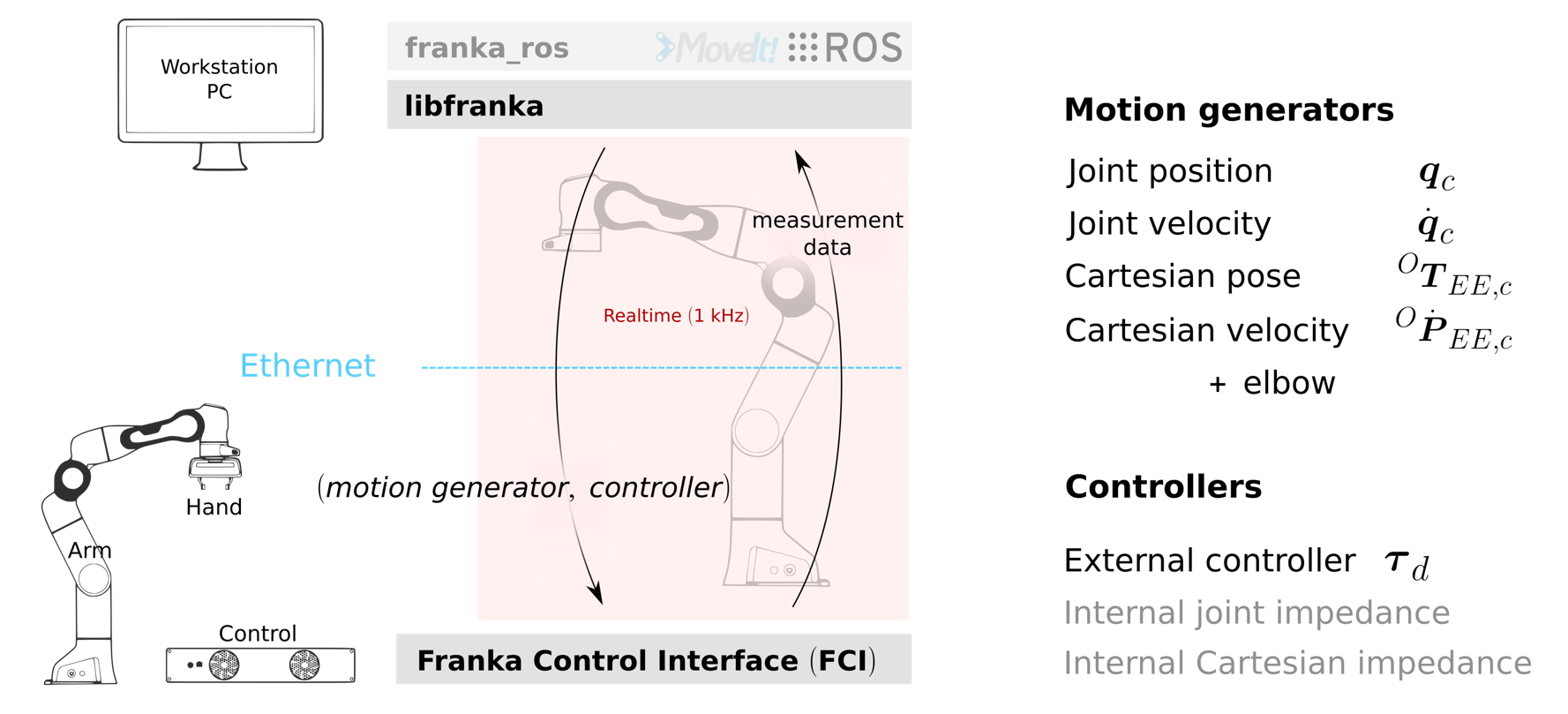 Fig. 1. Libfranka Realtime interfaces: motion generators and controllers
Fig. 1. Libfranka Realtime interfaces: motion generators and controllers
Realtime commands are UDP based and require a 1 kHz connection to Control. There are two types of real-time interfaces: a. Motion generators, which define a robot motion in joint or Cartesian space; b. Controllers, which define the torques to be sent to the robot joints. Details instruction to generate real-time commands from libfranka control loop is in here. I have no idea what does it actually mean here by external or internal, but fortunately, I don’t have to really figure it our temporarily. Just follow the instruction below:
1
2
try {
franka::Robot robot("<fci-ip>"); // build connect and instantiate the robot
Build a real-time loop (motion generator or controller) by directly defined a callback function in robot.control(), which receives the robot state in real-time and return the specific types of commands interface.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
robot.control(
[=, &time](const franka::RobotState&, franka::Duration period) -> franka::JointVelocities {
time += period.toSec();
double cycle = std::floor(std::pow(-1.0, (time - std::fmod(time, time_max)) / time_max));
double omega = cycle * omega_max / 2.0 * (1.0 - std::cos(2.0 * M_PI / time_max * time));
franka::JointVelocities velocities = 0.0;
if (time >= 2 * time_max) {
std::cout << std::endl << "Finished motion, shutting down example" << std::endl;
return franka::MotionFinished(velocities);
}
return velocities;
});
This registered control method of the franka::Robot class will then run the control loop automatically by executing the callback function at a 1 kHz frequency. All control loops are finished once the motion_finished flag of a real-time command is set to true. As in this example, it uses the joint velocity motion generator interface, as it returns a franka::JointVelocities object. Note that if you use only a motion generator, the default controller is the internal joint impedance controller. We don’t actually have to care about this, according the demands so far from the previous page, the only thing left to do is to build another CartesianVelocities based motion generator in control loop.
Prerequisite
Before getting into the details, you need to first prepare the computer to connect with the Franka robot. I will skip some details here.
- Of course you should first build the FrankX and libfranka from source and install them
- Set up the real-time kernel for running the libfranka and Franka robot.
- Connect to the Franka robot based on its ip address (sometimes the end-effector may not initialized correctly on the first connection, if so, you need to restart the end-effector itself from the control panel
192.168.178.12in settings)
Motion Generation Node
The biggest problem encountered here is to set constraints on your desired commands and further smooth them, otherwise you will constantly encounter the cartesian motion generator joint acceleration discontinuity or other similar errors. The detailed specifications on this issue is listed here. Basically, it prevent the robot from a sudden acceleration on their joints. The motion will be aborted accordingly unless the necessary conditions are fulfilled along the trajectory.
Considering we are building a CartesianVelocities based control, the necessary conditions for us are as followed:
Transform the desired orientation target into rotary speed before that, and conduct a speed limit on three elements here.
1
2
3
4
// dP limit
target_v_x = std::max(-TRANSLATION_VEL_LIMIT, std::min(target_v_x, TRANSLATION_VEL_LIMIT));
target_v_y = std::max(-TRANSLATION_VEL_LIMIT, std::min(target_v_y, TRANSLATION_VEL_LIMIT));
target_w_z = std::max(-ROTATION_VEL_LIMIT, std::min(target_w_z, ROTATION_VEL_LIMIT));
Calculate the target acceleration based on the target derivatives. Further limit and ramp the accelerations (equals to limit the jerk on acceleration) on three elements.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
// Compute target ddP
double target_a_x = (target_v_x - robot_state.O_dP_EE_c[0]) / dt;
double target_a_y = (target_v_y - robot_state.O_dP_EE_c[1]) / dt;
double target_a_wz = (target_w_z - robot_state.O_dP_EE_c[5]) / dt;
// ddP limit
target_a_x = std::max(-TRANSLATION_ACC_LIMIT, std::min(target_a_x, TRANSLATION_ACC_LIMIT));
target_a_y = std::max(-TRANSLATION_ACC_LIMIT, std::min(target_a_y, TRANSLATION_ACC_LIMIT));
target_a_wz = std::max(-ROTATION_ACC_LIMIT, std::min(target_a_wz, ROTATION_ACC_LIMIT));
// Ramp ddP based on dddP limits
double a_x = ramp(target_a_x, robot_state.O_ddP_EE_c[0], TRANSLATION_JERK_LIMIT, dt);
double a_y = ramp(target_a_y, robot_state.O_ddP_EE_c[1], TRANSLATION_JERK_LIMIT, dt);
double a_wz = ramp(target_a_wz, robot_state.O_ddP_EE_c[5], ROTATION_JERK_LIMIT, dt);
The ramp function is as followed.
1
2
3
4
5
6
7
8
9
10
double ramp(double target, double previous, double max_rate, double dt)
{
double diff = target - previous;
double max_change = max_rate * dt;
if (fabs(diff) > max_change)
{
target = previous + max_change * (diff > 0 ? 1 : -1);
}
return target;
}
Update the actual derivates based on ramped acceleration, the generated cartesian motion here is finally acceptable for the robot, which is smoothed on its derivative, acceleration and jerk.
1
2
3
double v_x = robot_state.O_dP_EE_c[0] + a_x * dt;
double v_y = robot_state.O_dP_EE_c[1] + a_y * dt;
double w_z = robot_state.O_dP_EE_c[5] + a_wz * dt;
The numerical value on Limits in the Cartesian space are as follows:
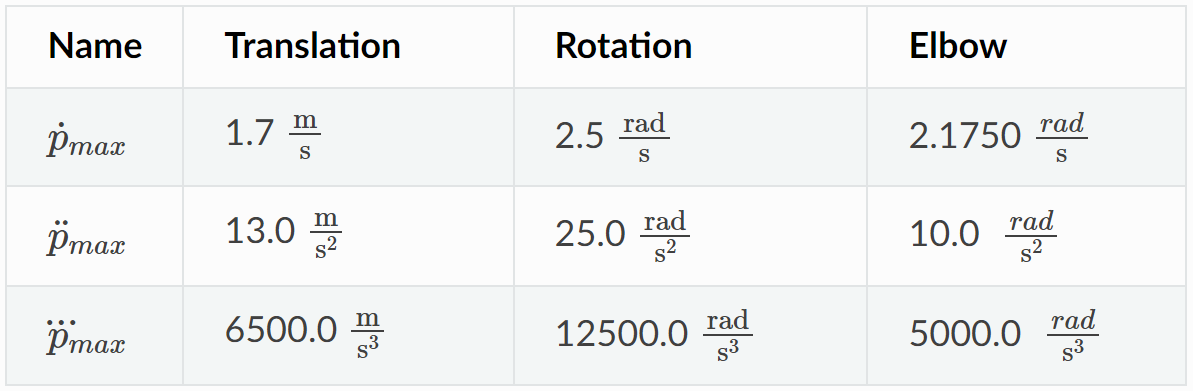
We further turn them down accordingly to ensure a smoothed movement.
1
2
3
4
5
6
#define TRANSLATION_VEL_LIMIT 1.7 // dp.Translation - (m/s)
#define TRANSLATION_ACC_LIMIT 13.0 * 0.1 // ddp.Translation - (m/s^2) : factor 10
#define TRANSLATION_JERK_LIMIT 6500.0 * 0.1 // dddp.Translation - (m/s^3) : factor 10
#define ROTATION_VEL_LIMIT 2.5 // dp.Rotation - (rad/s)
#define ROTATION_ACC_LIMIT 25.0 * 0.1 // ddp.Rotation - (rad/s^2) : factor 10
#define ROTATION_JERK_LIMIT 12500.0 * 0.1 // dddp.Rotation - (rad/s^3) : factor 10
The entire implementation motion_generator.cpp is as followed:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
#include <cmath>
#include <iostream>
#include <mutex>
#include <thread>
#include <franka/exception.h>
#include <franka/robot.h>
#include "examples_common.h"
#include <ros/ros.h>
#include <whisker_customed_msg/FrankaCtrl.h>
#include <geometry_msgs/TwistStamped.h>
#include <Eigen/Dense>
#define TOTAL_VEL 0.006 // Ensure consistency
#define TRANSLATION_VEL_LIMIT 1.7 // dp.Translation - (m/s)
#define TRANSLATION_ACC_LIMIT 13.0 * 0.1 // ddp.Translation - (m/s^2) : factor 10
#define TRANSLATION_JERK_LIMIT 6500.0 * 0.1 // dddp.Translation - (m/s^3) : factor 10
#define ROTATION_VEL_LIMIT 2.5 // dp.Rotation - (rad/s)
#define ROTATION_ACC_LIMIT 25.0 * 0.1 // ddp.Rotation - (rad/s^2) : factor 10
#define ROTATION_JERK_LIMIT 12500.0 * 0.1 // dddp.Rotation - (rad/s^3) : factor 10
struct ControlCommands
{
double x_velocity = 0.0;
double y_velocity = -TOTAL_VEL;
double rotation = M_PI; // Target rotation position on z-axis
std::mutex mtx;
};
ControlCommands control_commands;
std::array<double, 16> initial_pose;
double accumulated_val = control_commands.rotation;
void controlCommandCallback(const whisker_customed_msg::FrankaCtrl::ConstPtr &msg)
{
std::lock_guard<std::mutex> lock(control_commands.mtx);
control_commands.x_velocity = msg->xvel;
control_commands.y_velocity = msg->yvel;
control_commands.rotation = static_cast<double>(msg->orientation); // DYX : float32 -> double
ROS_INFO("!!! Received control command: x_velocity=%f, y_velocity=%f, rotation=%f", msg->xvel, msg->yvel, msg->orientation);
}
double ramp(double target, double previous, double max_rate, double dt)
{
double diff = target - previous;
double max_change = max_rate * dt;
if (fabs(diff) > max_change)
{
target = previous + max_change * (diff > 0 ? 1 : -1);
}
return target;
}
Eigen::Vector3d rotationMatrixToEulerAngles(const Eigen::Matrix3d &R)
{
Eigen::Vector3d euler;
euler[0] = atan2(R(2, 1), R(2, 2)); // Roll
euler[1] = atan2(-R(2, 0), sqrt(pow(R(2, 1), 2) + pow(R(2, 2), 2))); // Pitch
euler[2] = atan2(R(1, 0), R(0, 0)); // Yaw
return euler;
}
geometry_msgs::TwistStamped matrixToTwistStamped(const std::array<double, 16> &O_T_EE)
{
Eigen::Matrix3d rotation_matrix;
rotation_matrix << O_T_EE[0], O_T_EE[1], O_T_EE[2],
O_T_EE[4], O_T_EE[5], O_T_EE[6],
O_T_EE[8], O_T_EE[9], O_T_EE[10];
Eigen::Vector3d euler_angles = rotationMatrixToEulerAngles(rotation_matrix);
geometry_msgs::TwistStamped twist;
twist.twist.linear.x = O_T_EE[12];
twist.twist.linear.y = O_T_EE[13];
twist.twist.linear.z = O_T_EE[14];
twist.twist.angular.x = euler_angles[0];
twist.twist.angular.y = euler_angles[1];
twist.twist.angular.z = euler_angles[2];
return twist;
}
void wrapDetection(double cur, double pre)
{
if (!std::isnan(pre))
{
if (pre > 0 && cur < 0 && std::abs(pre - cur) > 3) // pi -> -pi
{
accumulated_val += (cur + 2 * M_PI) - pre;
}
else if (pre < 0 && cur > 0 && std::abs(pre - cur) > 3) // -pi -> pi
{
accumulated_val += (cur - 2 * M_PI) - pre;
}
else // 0 -> -0 and -0 -> 0 and all the other situations
{
accumulated_val += cur - pre;
}
}
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "robot_ctrl");
ros::NodeHandle nh;
if (argc != 2)
{
ROS_ERROR("Usage: %s <robot-hostname>", argv[0]);
return -1;
}
ros::Subscriber control_command_sub = nh.subscribe("/Franka_Ctrl", 10, controlCommandCallback);
ros::Publisher robot_state_pub = nh.advertise<geometry_msgs::TwistStamped>("/FrankaEE_State", 10);
// Use AsyncSpinner for non-blocking callback handling, the spin loop and control loop were separate
ros::AsyncSpinner spinner(1);
spinner.start();
try
{
franka::Robot robot(argv[1]);
setDefaultBehavior(robot);
setDefaultBehavior(robot);
std::array<double, 7> q_default = 0; // Franka Robot Default Pose
// std::array<double, 7> q_initPosi_MPI = 0.21412348725398378; // Bottle
// std::array<double, 7> q_initPosi_MPI = 0.027985085379659082; // 160 circle
std::array<double, 7> q_initPosi_MPI = 0.212508466987283; // 160 rectangle
ROS_WARN("This example will move the robot! Please make sure to have the user stop button at hand!");
ROS_INFO("Press Enter to continue...");
std::cin.ignore();
MotionGenerator motion_generator_default(0.5, q_default);
robot.control(motion_generator_default);
MotionGenerator motion_generator_initPosi(0.5, q_initPosi_MPI);
robot.control(motion_generator_initPosi);
ROS_INFO("Finished moving to initial joint configuration.");
robot.setJointImpedance(3000);
std::array<double, 7> lower_torque_thresholds_nominal25.0;
std::array<double, 7> upper_torque_thresholds_nominal35.0;
std::array<double, 7> lower_torque_thresholds_acceleration25.0;
std::array<double, 7> upper_torque_thresholds_acceleration35.0;
std::array<double, 6> lower_force_thresholds_nominal30.0;
std::array<double, 6> upper_force_thresholds_nominal40.0;
std::array<double, 6> lower_force_thresholds_acceleration30.0;
std::array<double, 6> upper_force_thresholds_acceleration40.0;
robot.setCollisionBehavior(
lower_torque_thresholds_acceleration, upper_torque_thresholds_acceleration,
lower_torque_thresholds_nominal, upper_torque_thresholds_nominal,
lower_force_thresholds_acceleration, upper_force_thresholds_acceleration,
lower_force_thresholds_nominal, upper_force_thresholds_nominal);
double time_max = 150.0;
double time = 0.0;
double previous_yaw = control_commands.rotation;
robot.control([=, &time, &robot_state_pub, &previous_yaw](const franka::RobotState &robot_state, franka::Duration period) -> franka::CartesianVelocities
{
time += period.toSec();
double dt = period.toSec();
if (time == 0.0) {
initial_pose = robot_state.O_T_EE_c;
}
ROS_INFO("-----");
ROS_INFO("At time : %f; Perception control commands : %f, %f, %f.", time, control_commands.x_velocity, control_commands.y_velocity, control_commands.rotation);
geometry_msgs::TwistStamped ee_state = matrixToTwistStamped(robot_state.O_T_EE);
ee_state.header.stamp = ros::Time::now();
robot_state_pub.publish(ee_state);
ROS_INFO("At time : %f; Robot cartesian pose : %f, %f, %f.", time, ee_state.twist.linear.x, ee_state.twist.linear.y, ee_state.twist.angular.z);
// Retrieve linear velocity
double target_v_x;
double target_v_y;
{
std::lock_guard<std::mutex> lock(control_commands.mtx);
target_v_x = control_commands.x_velocity;
target_v_y = control_commands.y_velocity;
}
// Retrieve target rotation and transform into angular velocity
double current_yaw = atan2(robot_state.O_T_EE_c[1], robot_state.O_T_EE_c[0]);
wrapDetection(current_yaw, previous_yaw);
previous_yaw = current_yaw;
double target_yaw;
{
std::lock_guard<std::mutex> lock(control_commands.mtx);
target_yaw = control_commands.rotation;
}
ROS_INFO("Current yaw: %f, accumulated yaw: %f", current_yaw, accumulated_val);
double angular_error = target_yaw - accumulated_val;
double target_w_z = angular_error * 1.0;
// dP limit
target_v_x = std::max(-TRANSLATION_VEL_LIMIT, std::min(target_v_x, TRANSLATION_VEL_LIMIT));
target_v_y = std::max(-TRANSLATION_VEL_LIMIT, std::min(target_v_y, TRANSLATION_VEL_LIMIT));
target_w_z = std::max(-ROTATION_VEL_LIMIT, std::min(target_w_z, ROTATION_VEL_LIMIT));
// Compute target ddP
double target_a_x = (target_v_x - robot_state.O_dP_EE_c[0]) / dt;
double target_a_y = (target_v_y - robot_state.O_dP_EE_c[1]) / dt;
double target_a_wz = (target_w_z - robot_state.O_dP_EE_c[5]) / dt;
// ddP limit
target_a_x = std::max(-TRANSLATION_ACC_LIMIT, std::min(target_a_x, TRANSLATION_ACC_LIMIT));
target_a_y = std::max(-TRANSLATION_ACC_LIMIT, std::min(target_a_y, TRANSLATION_ACC_LIMIT));
target_a_wz = std::max(-ROTATION_ACC_LIMIT, std::min(target_a_wz, ROTATION_ACC_LIMIT));
// Ramp ddP based on dddP limits
double a_x = ramp(target_a_x, robot_state.O_ddP_EE_c[0], TRANSLATION_JERK_LIMIT, dt);
double a_y = ramp(target_a_y, robot_state.O_ddP_EE_c[1], TRANSLATION_JERK_LIMIT, dt);
double a_wz = ramp(target_a_wz, robot_state.O_ddP_EE_c[5], ROTATION_JERK_LIMIT, dt);
// Update dP based on ramped ddP
double v_x = robot_state.O_dP_EE_c[0] + a_x * dt;
double v_y = robot_state.O_dP_EE_c[1] + a_y * dt;
double w_z = robot_state.O_dP_EE_c[5] + a_wz * dt;
ROS_INFO("At time : %f; Final control commands input : %f, %f, %f.", time, v_x, v_y, w_z);
franka::CartesianVelocities output = ;
if (time >= time_max) {
ROS_INFO("Finished motion, shutting down example");
return franka::MotionFinished(output);
}
return output; });
}
catch (const franka::Exception &e)
{
ROS_ERROR("Franka exception: %s", e.what());
try
{
franka::Robot robot(argv[1]);
ROS_WARN("Attempting automatic error recovery...");
robot.automaticErrorRecovery();
ROS_INFO("Automatic error recovery successful.");
}
catch (const franka::Exception &recovery_exception)
{
ROS_ERROR("Automatic error recovery failed: %s", recovery_exception.what());
return -1;
}
}
spinner.stop();
return 0;
}
Run this ros node by rosrun franka_whisker robot_control 192.168.178.12 start to receive the desired commands from ActivePerception4Whisker node. The entire project is here.